
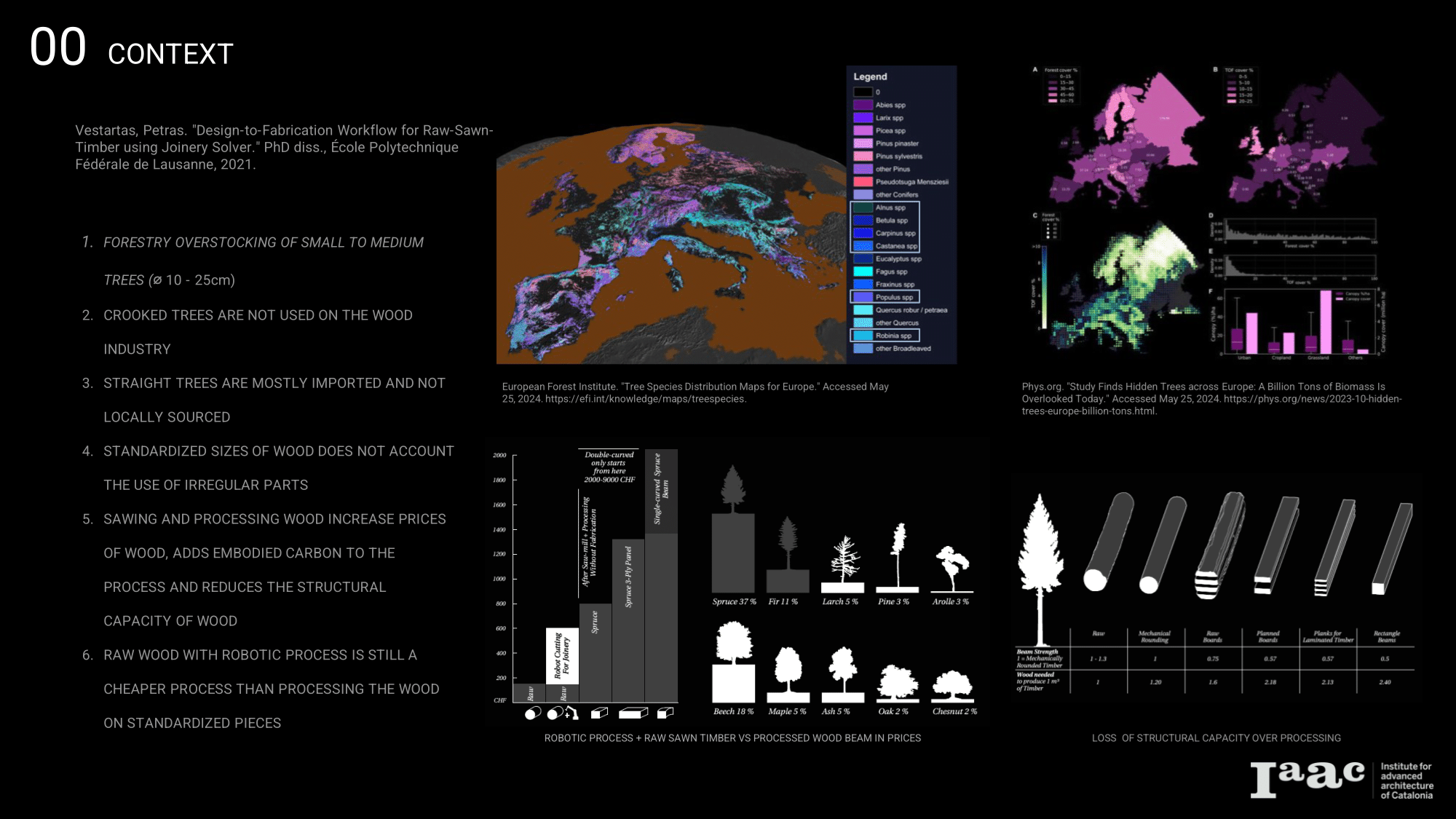
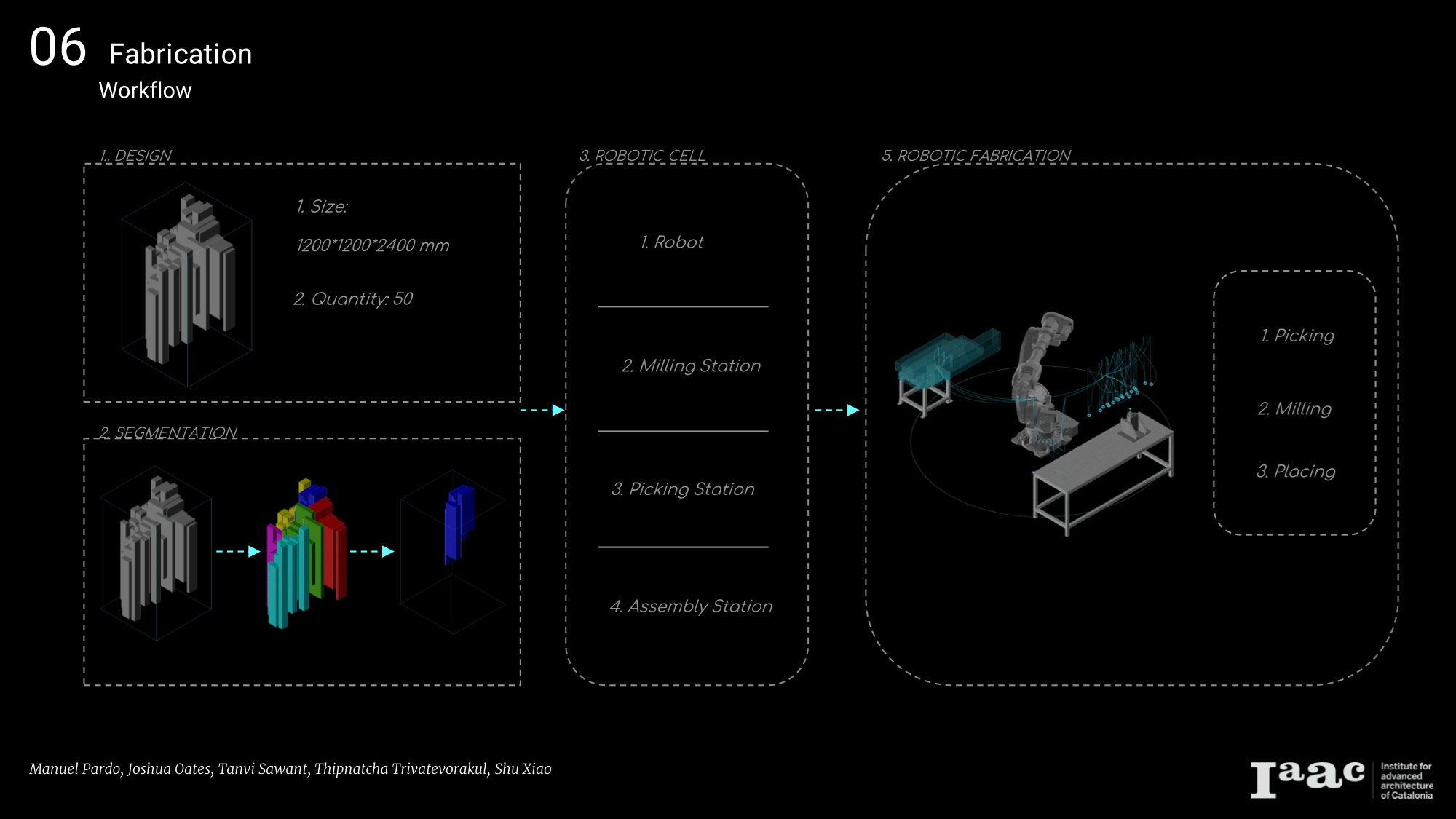
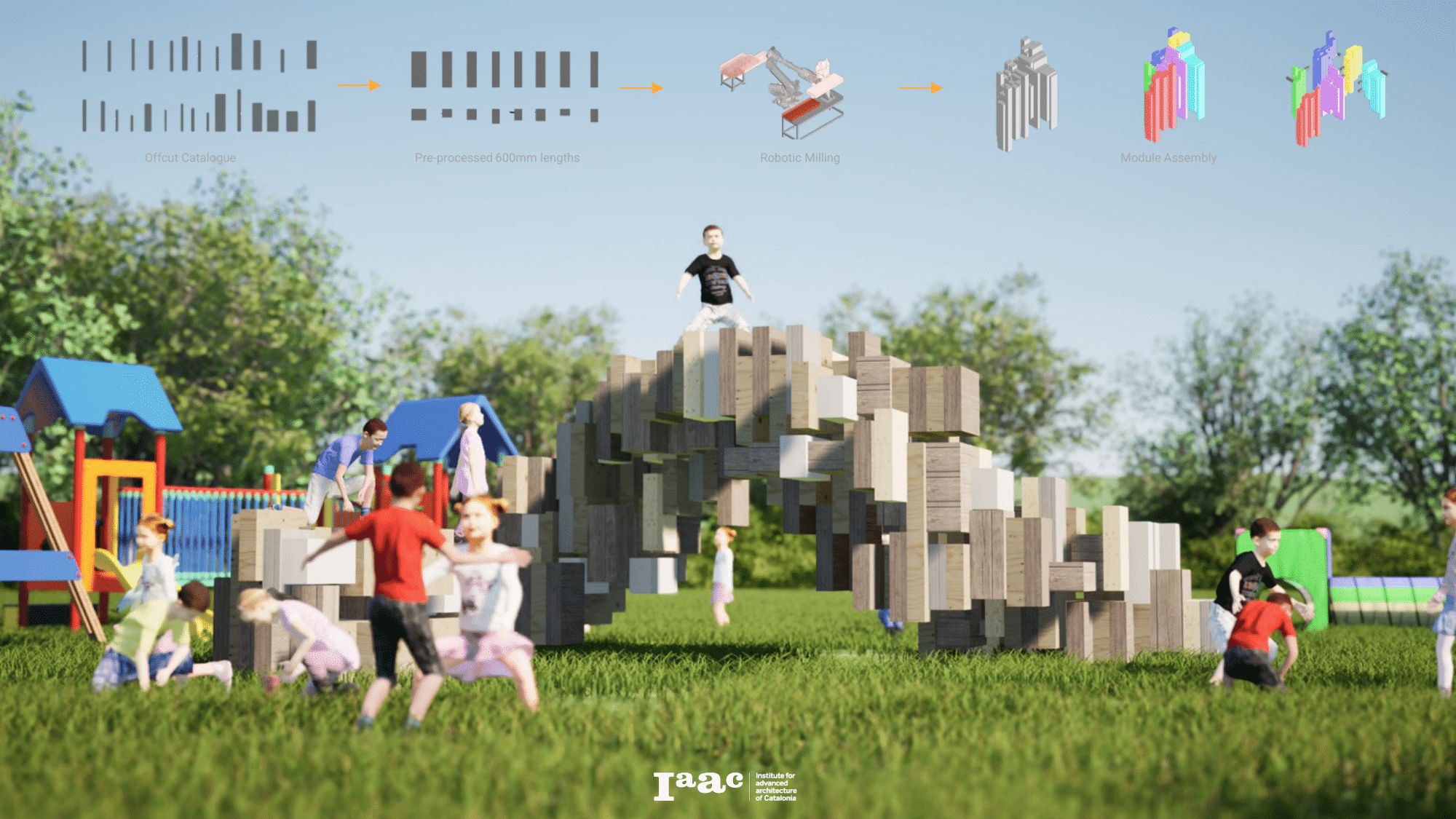
Investigates how robotic fabrication can unlock the use of irregular timber offcuts - materials typically discarded due to non-standard forms. By combining computational design with robotic milling and placement, the project proposes an adaptable construction system that reclaims undervalued forestry resources and redefines their architectural potential.
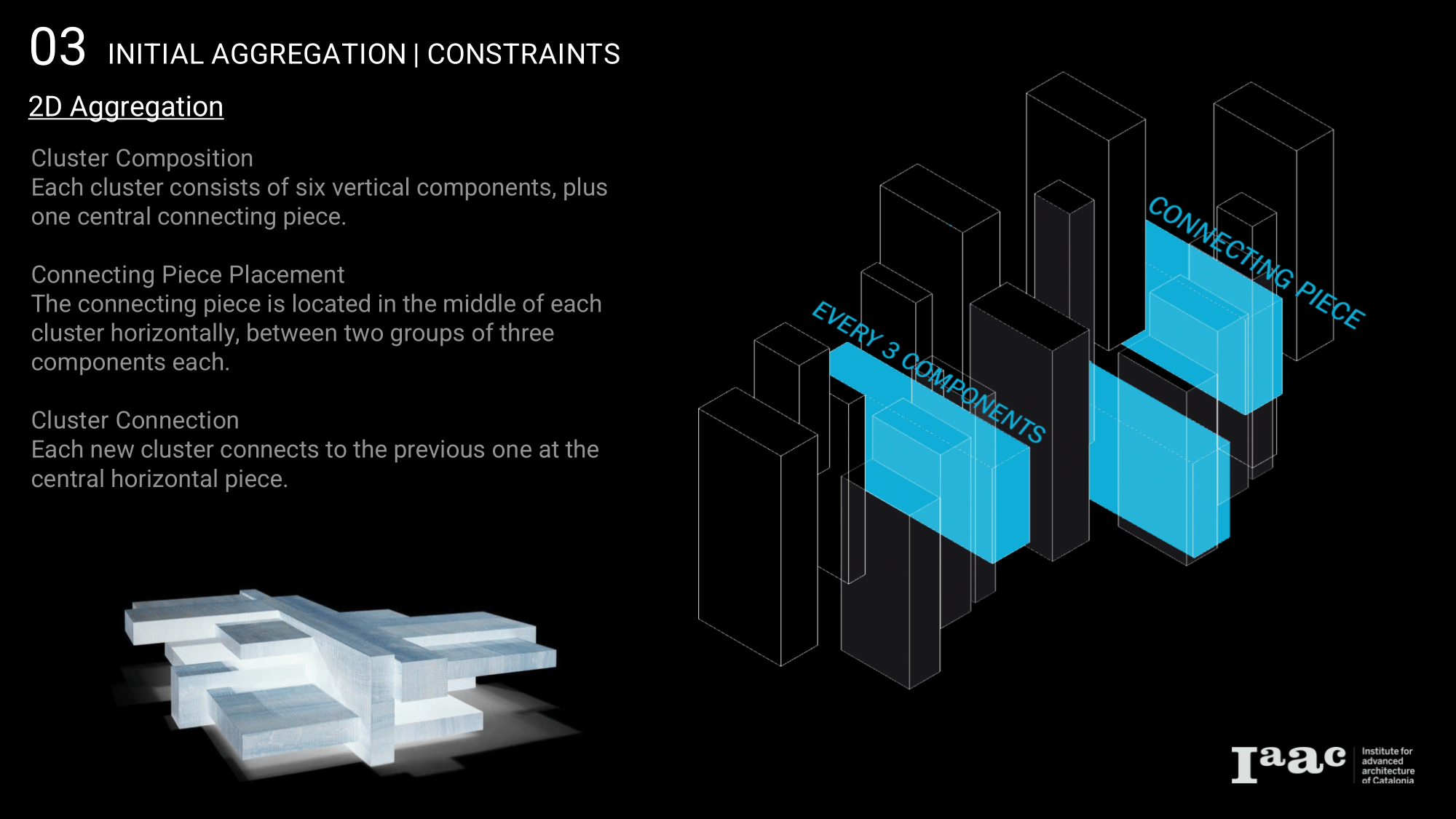
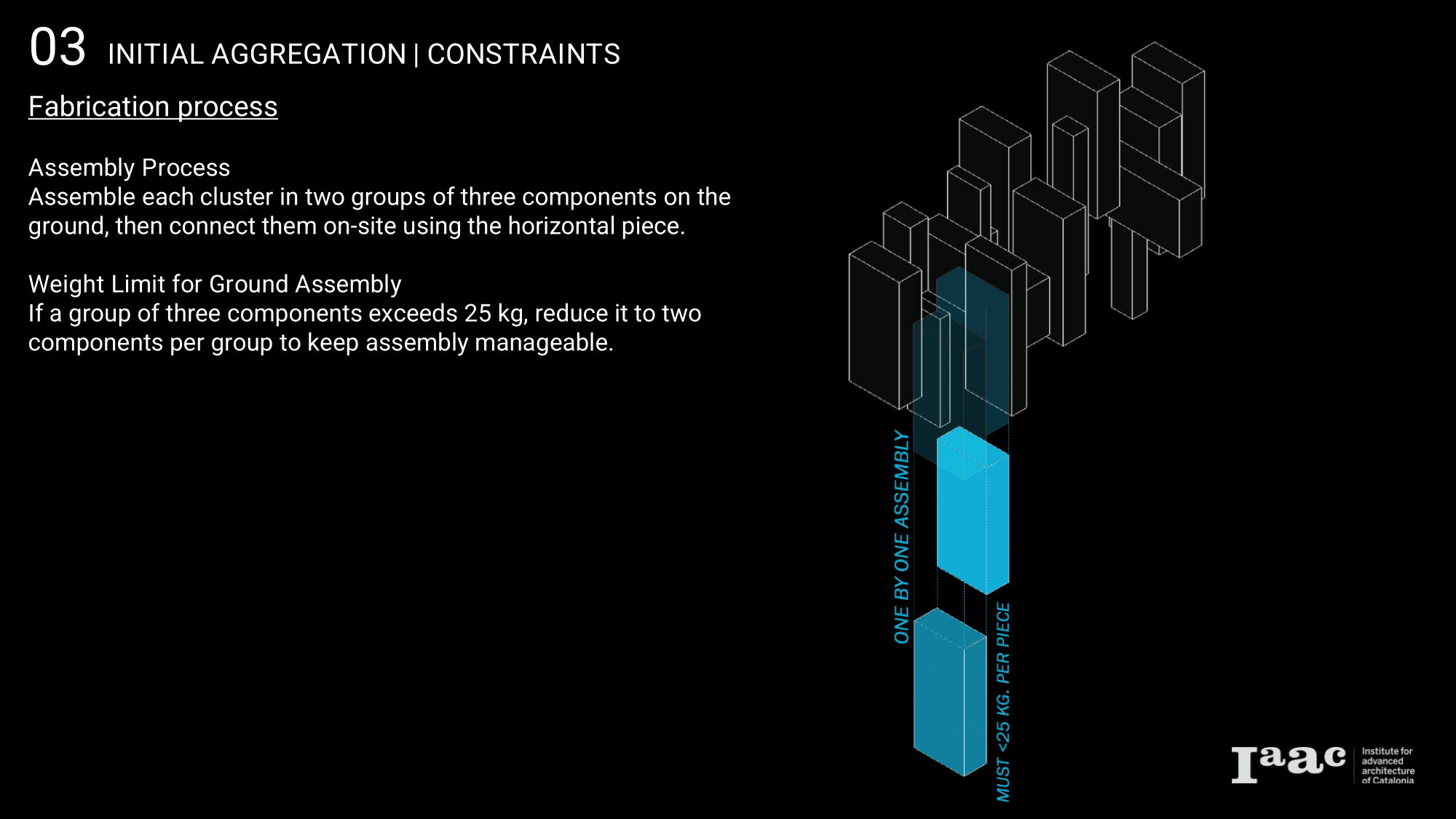
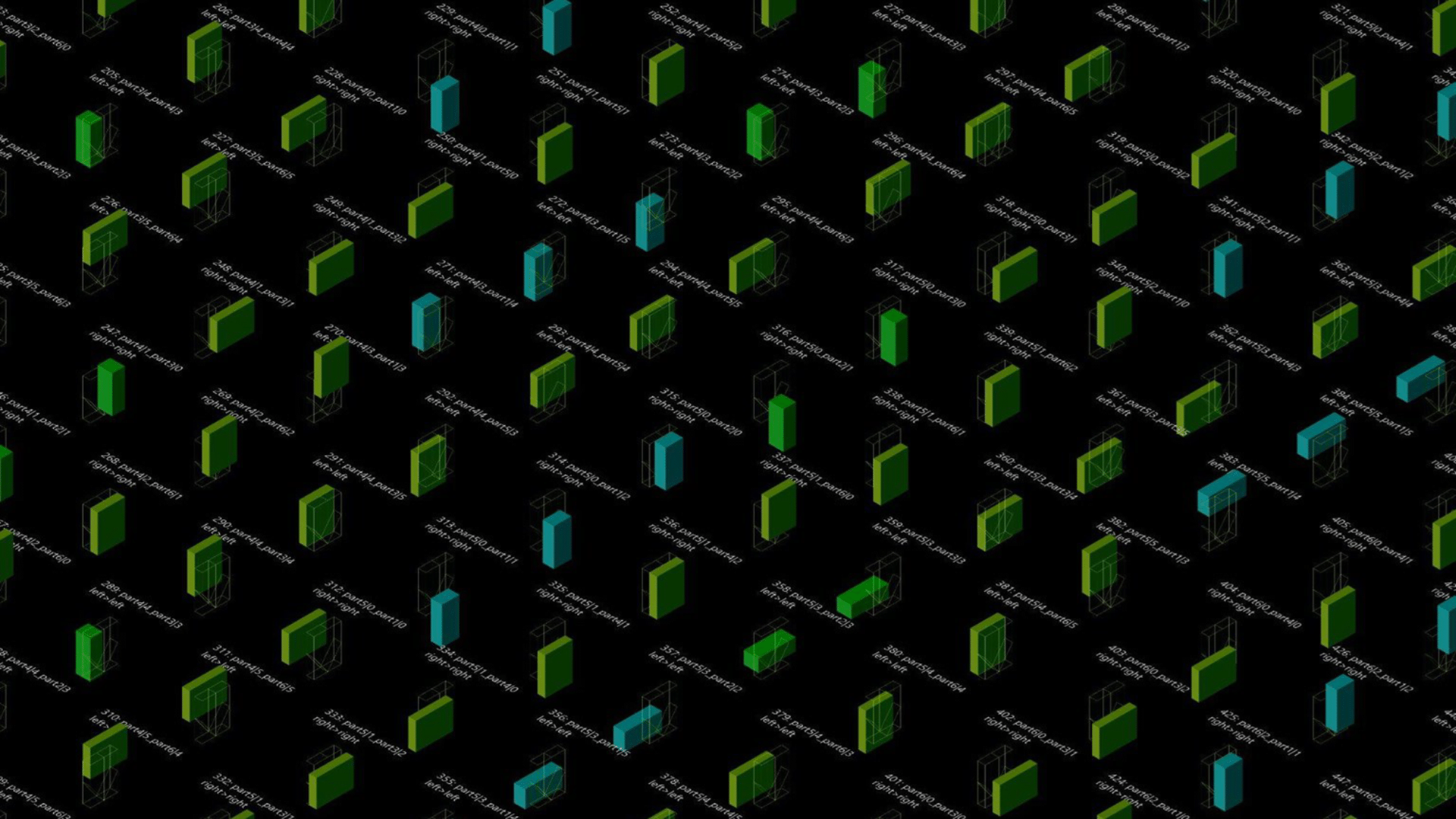
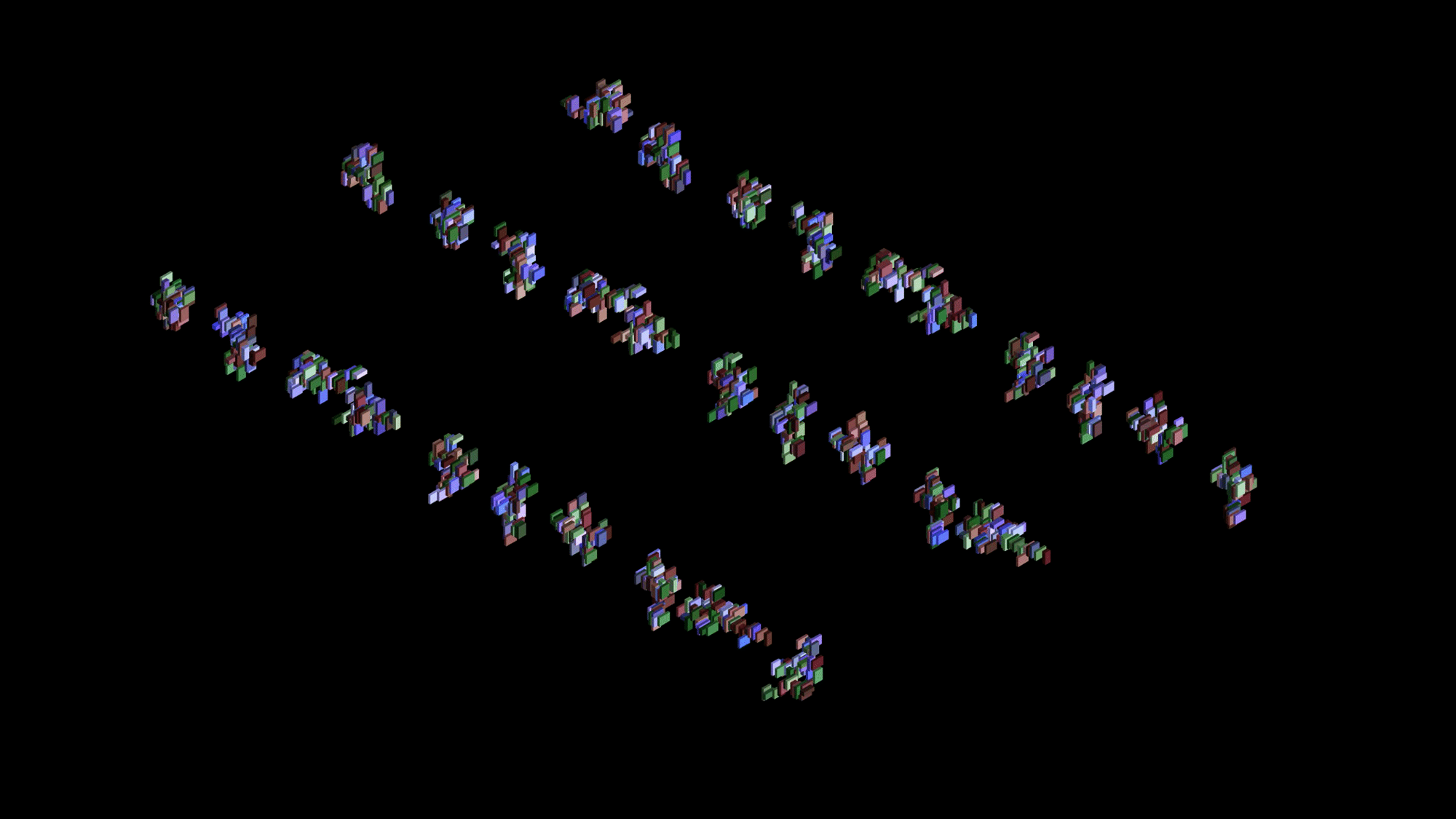
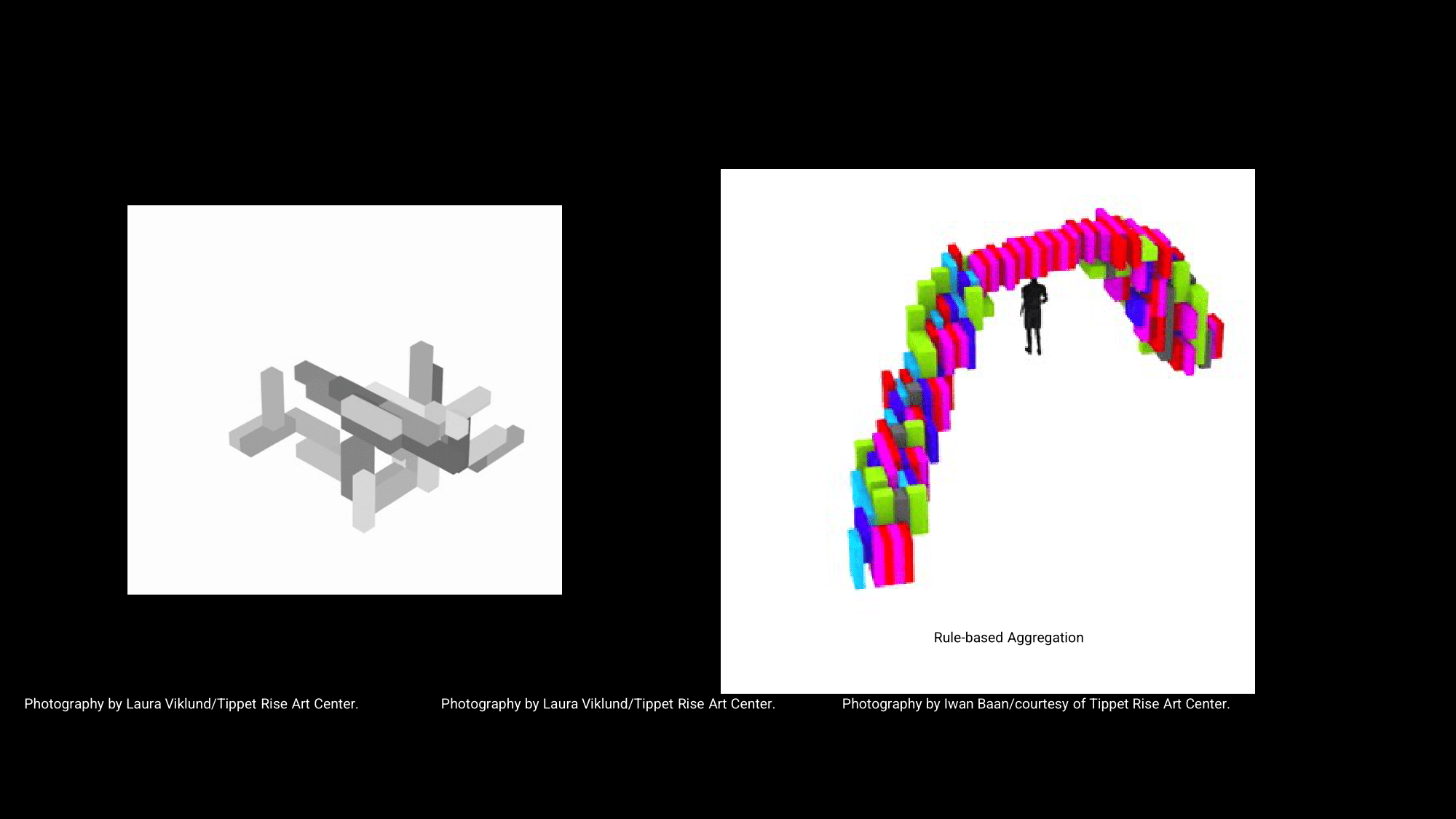
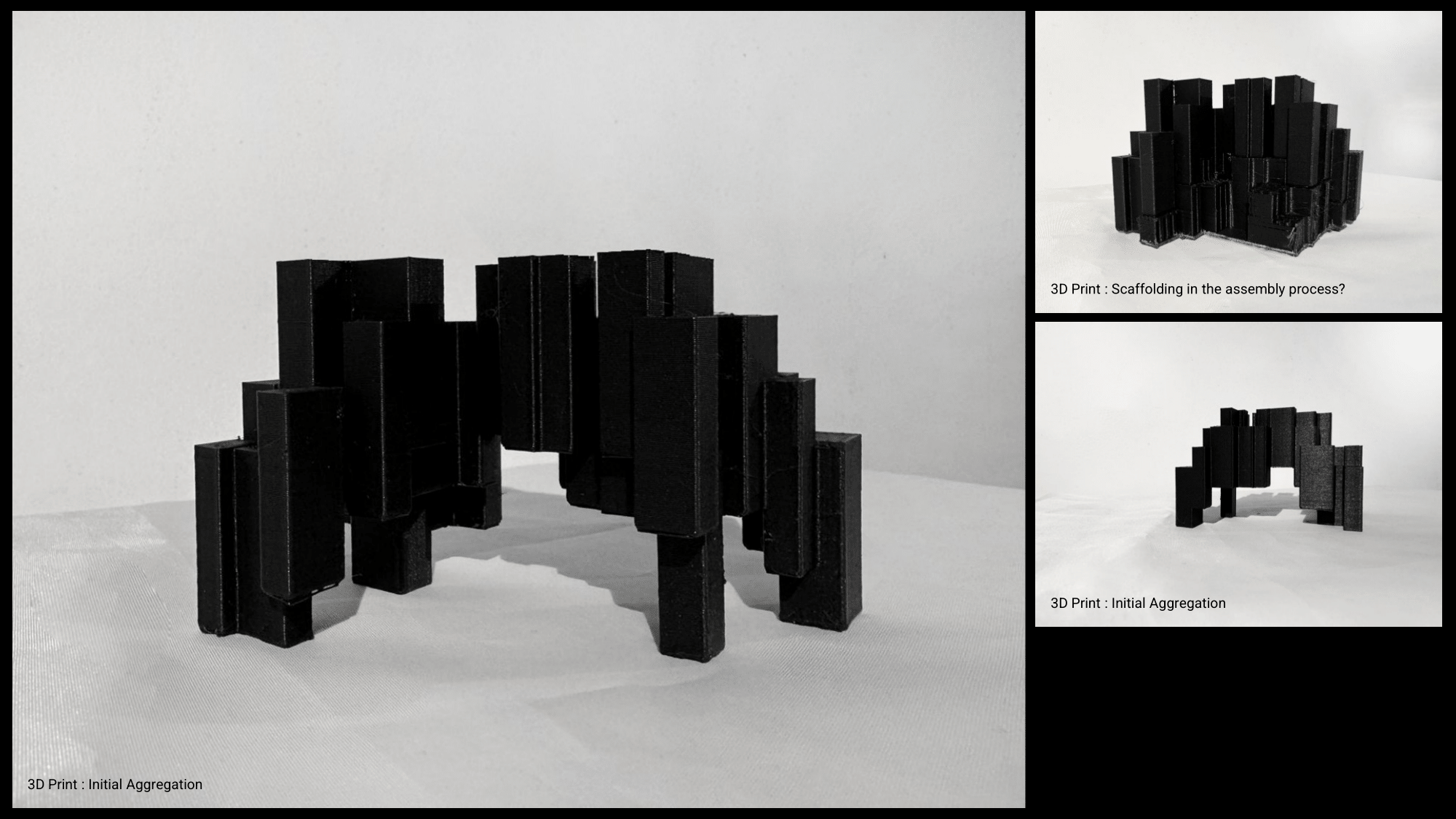
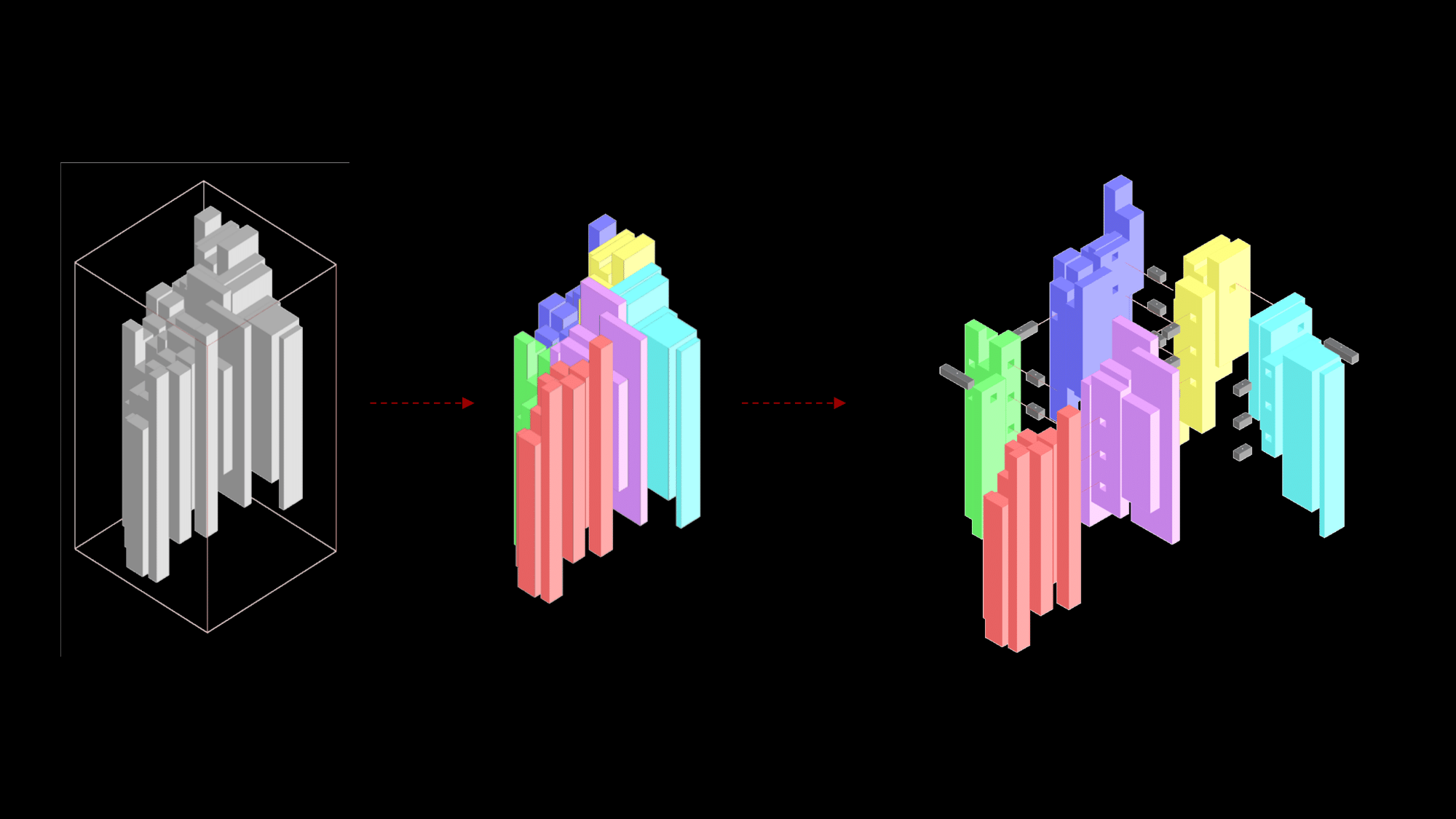
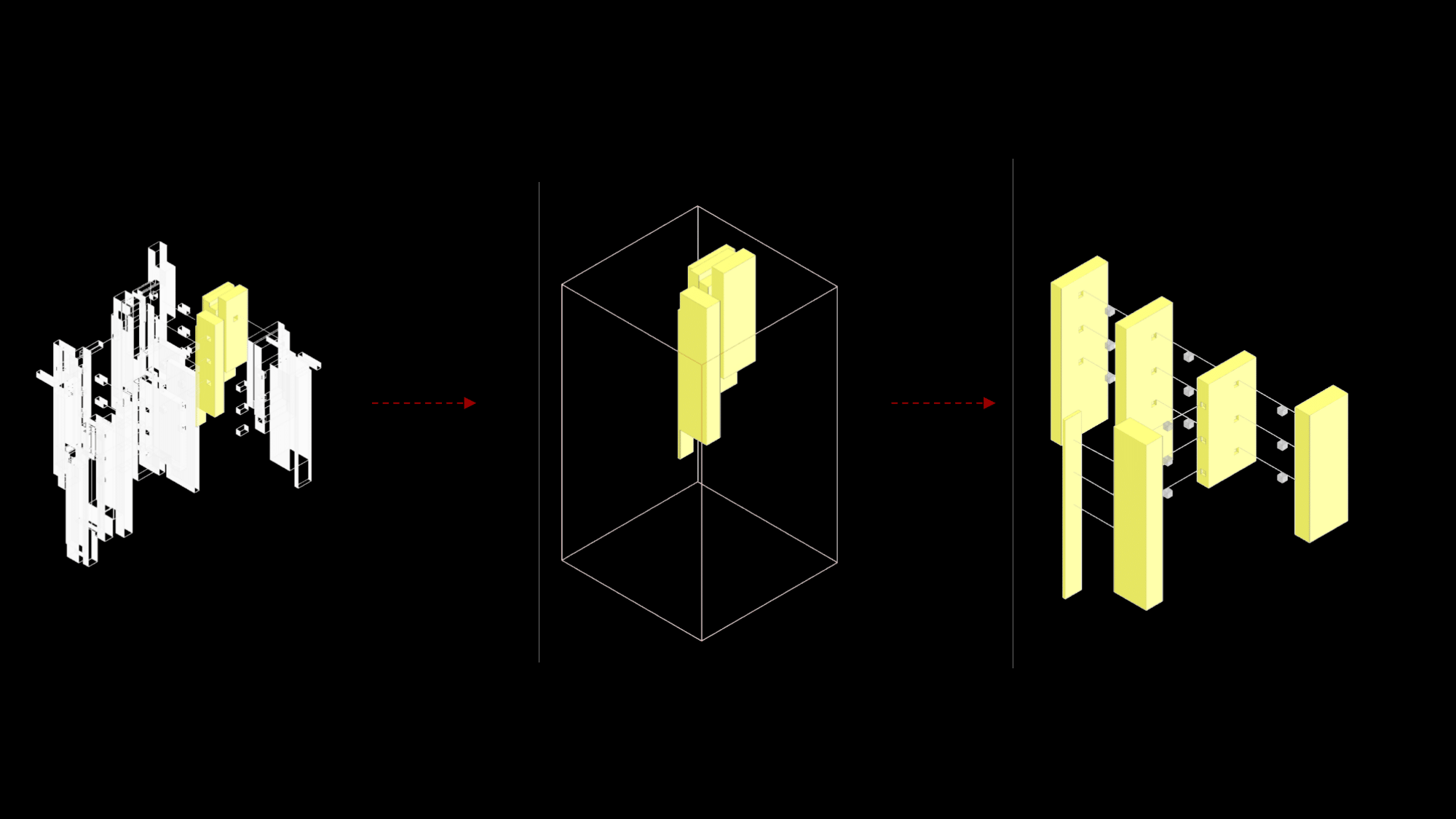
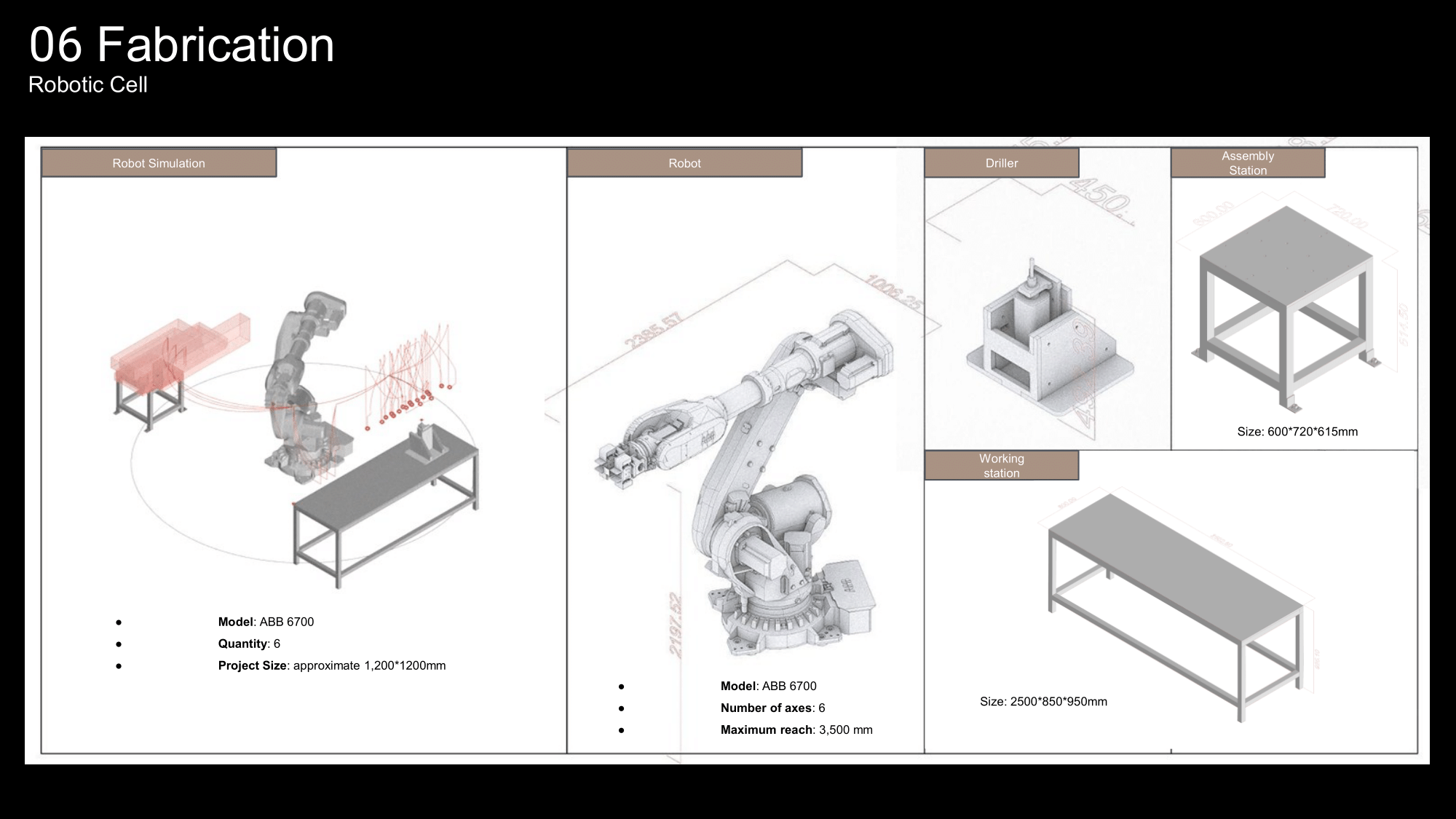
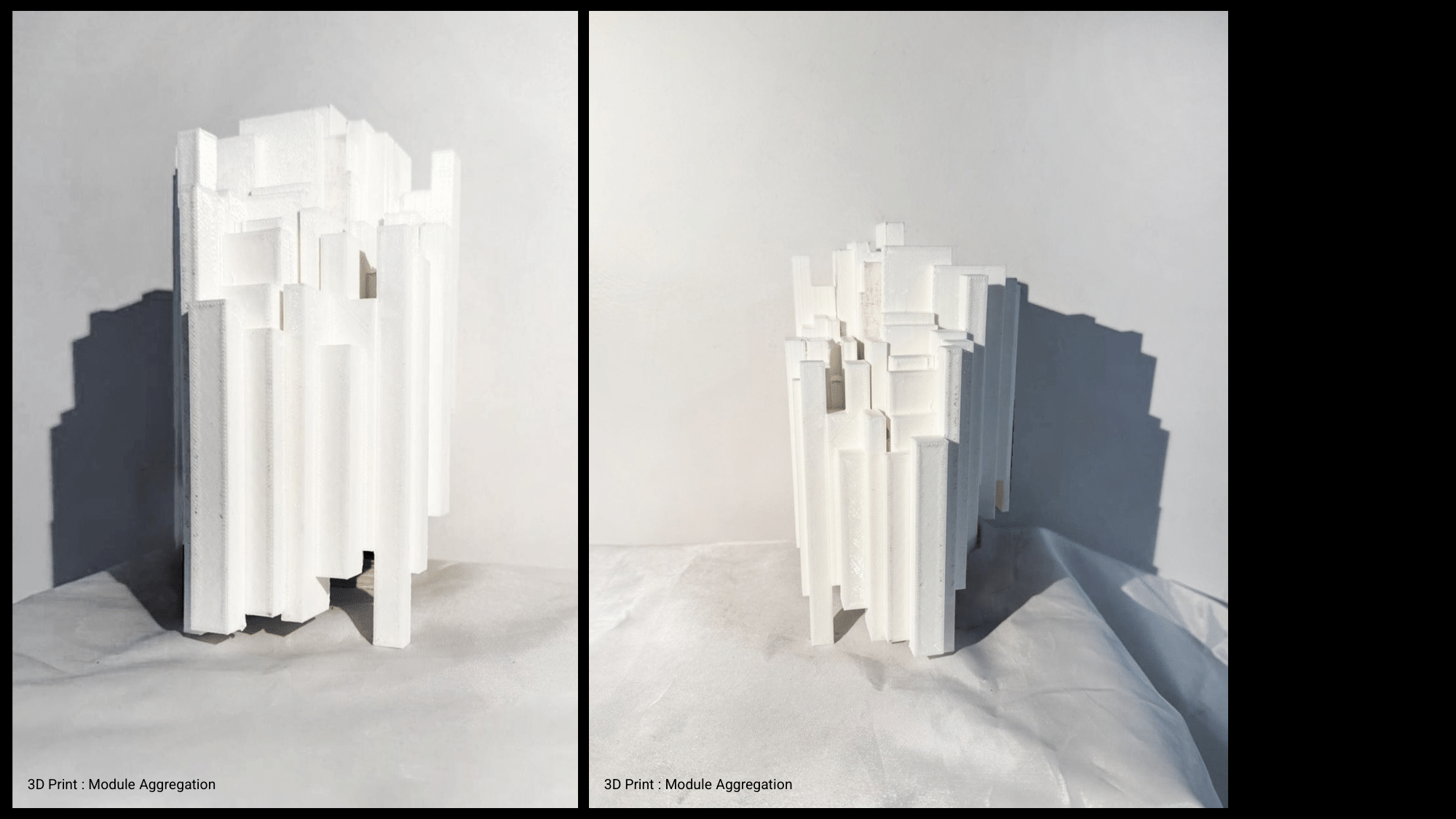
Develops a workflow where robots segment, mill, and assemble raw timber into clustered modules, creating scalable architectural forms from non-standard lengths. The project explores aggregation logics, joinery, and assembly sequences to balance structural performance with fabrication efficiency. By treating irregularity as a design driver rather than a limitation, it demonstrates how robotics can shift sustainable construction practices in dense urban contexts.





Please feel free to reach out if you share an interest in pushing the boundaries of design, collaborating on purposeful projects, or simply exchanging ideas over good coffee.
Josh Oates



.svg)